Los robots son increíblemente precisos, pero la delicadeza no siempre es su fuerte. Una máquina capaz de construir un coche con una precisión casi perfecta aún puede ejercer demasiada presión al trabajar en lugares donde hasta el más mínimo error importa, como dentro de un ojo humano o durante una cirugía delicada. Por eso, investigadores de la Universidad Jiao Tong de Shanghái están desarrollando un nuevo tipo de sensor de fuerza que podría ayudar a los robots a "sentir" con mayor precisión lo que tocan.
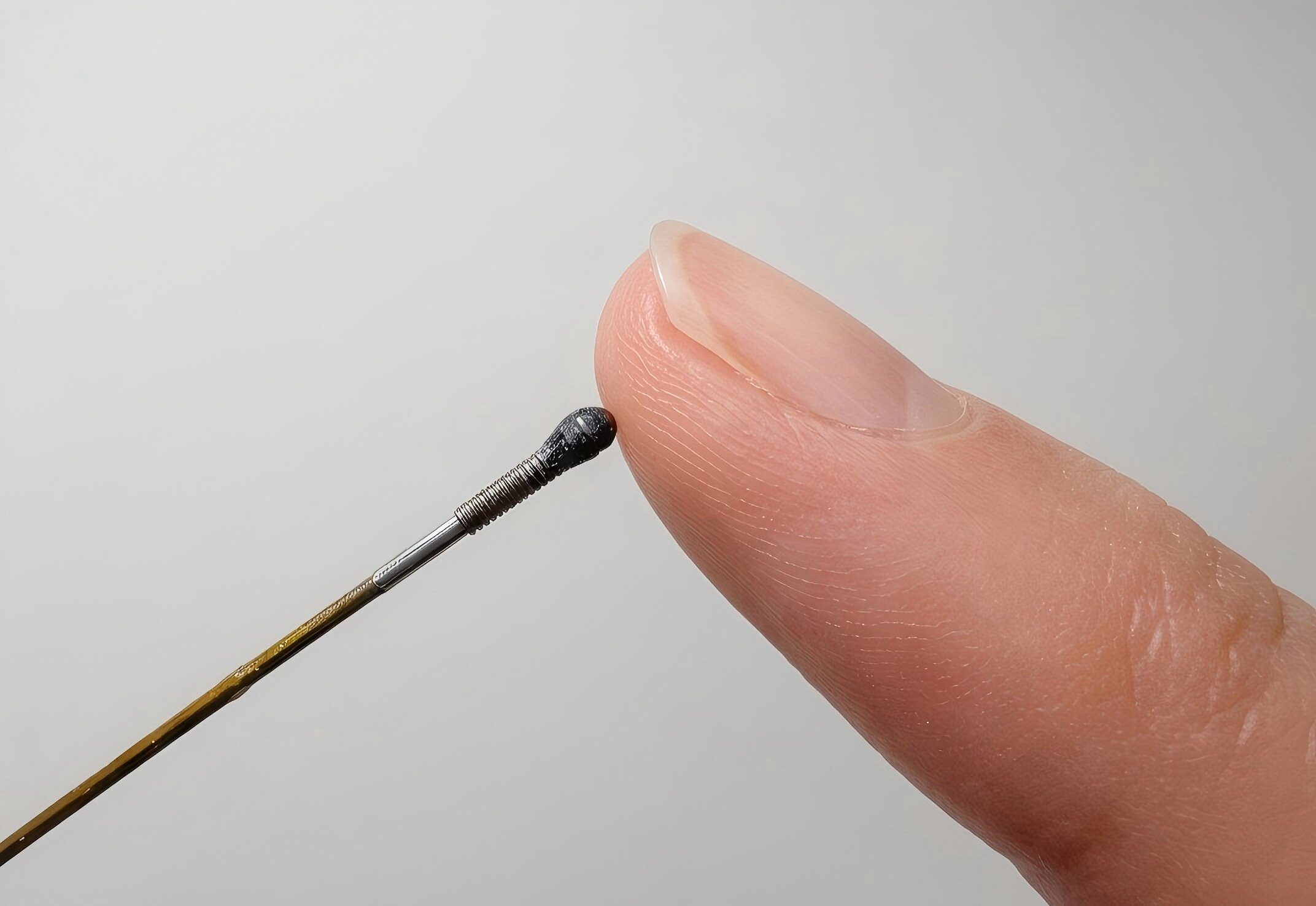
El sensor es diminuto, del tamaño aproximado de un grano de arroz, con tan solo 1,7 milímetros de ancho, lo que permite integrarlo en instrumental quirúrgico avanzado. Lo que lo hace especialmente interesante es que no depende de la electrónica tradicional. En su lugar, utiliza la luz para medir la fuerza desde cualquier dirección, incluyendo la presión, los movimientos de deslizamiento y la torsión. Su funcionamiento es el siguiente: en la punta de una fibra óptica se encuentra un material blando que cambia ligeramente de forma al entrar en contacto con algo. Esta pequeña deformación altera la forma en que la luz viaja a través del sensor. El patrón de luz modificado se envía mediante fibras ópticas a una cámara, que lo captura como una imagen. Posteriormente, los investigadores utilizan un modelo de aprendizaje automático para estudiar estos patrones de luz y convertirlos en lecturas de fuerza precisas. En resumen, el sistema aprende a "leer" el tacto únicamente mediante la luz, sin necesidad de cables ni múltiples sensores separados en un espacio tan reducido.
Por qué los robots necesitan sentir, no solo ver.
Las técnicas modernas de imagen quirúrgica ya son increíblemente avanzadas. Hoy en día, los cirujanos pueden ver el interior del cuerpo humano con una claridad impresionante. Sin embargo, uno de los retos a los que aún se enfrentan, sobre todo durante los procedimientos mínimamente invasivos, es percibir con precisión lo que tocan sus instrumentos. Un cirujano puede ver la zona con claridad en una pantalla, pero distinguir entre tejido sano y tejido problemático suele depender más de la experiencia y la intuición que de la información que proporciona el propio instrumento.
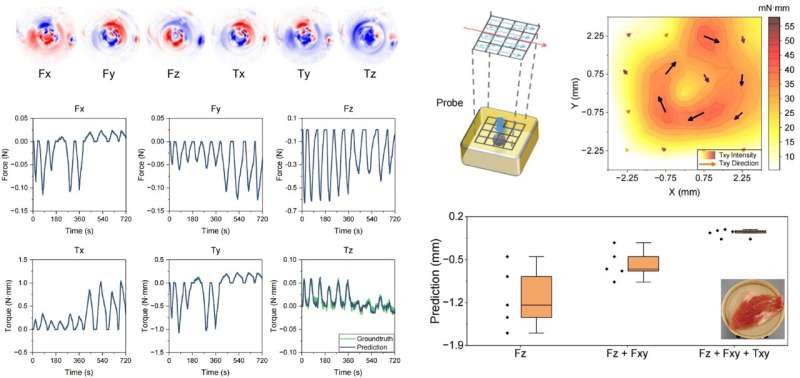
Ese es precisamente el problema que este nuevo sensor intenta resolver. Durante las pruebas, los investigadores lo utilizaron en un bloque de gelatina blanda con una pequeña esfera dura oculta debajo, diseñada para simular un tumor en el tejido humano. El sensor detectó el objeto oculto al percibir diferencias de rigidez a medida que se movía sobre la superficie. En cirugías robóticas, donde los médicos operan en espacios extremadamente reducidos y no siempre pueden confiar en el tacto directo, este tipo de retroalimentación táctil podría hacer que los procedimientos sean más seguros, más precisos y mucho menos dependientes de la intuición.
Todavía queda trabajo por hacer antes de que esto llegue a un quirófano.
Por ahora, estos resultados son más una prueba de que la idea funciona que un avance médico definitivo. Los propios investigadores admiten que aún queda mucho por descubrir. Fabricar sensores tan pequeños con una calidad constante a gran escala es mucho más difícil que crear una sola versión funcional en un laboratorio. El proceso de configuración también necesita simplificarse y volverse más fiable antes de que pueda utilizarse de forma realista en hospitales. Además, el sensor aún no ha superado las pruebas de resistencia a largo plazo que requieren los dispositivos médicos antes de que los médicos confíen en ellos durante procedimientos reales.
Aun así, la idea central de esta tecnología resulta realmente prometedora. En lugar de depender de múltiples y complejos sensores, el sistema utiliza una configuración mucho más sencilla basada en un único canal óptico y una cámara. Este tipo de diseño simple suele facilitar la mejora y la escalabilidad de las tecnologías a lo largo del tiempo, una vez que la ingeniería madura. El equipo trabaja ahora en la integración del sensor en herramientas quirúrgicas robóticas reales y en pruebas realizadas en entornos similares a quirófanos reales. Y aunque un sensor del tamaño de un grano de arroz capaz de "sentir" pueda parecer una innovación insignificante sobre el papel, podría llegar a ser de vital importancia para los cirujanos que guían instrumentos robóticos a través de espacios más pequeños que una uña.